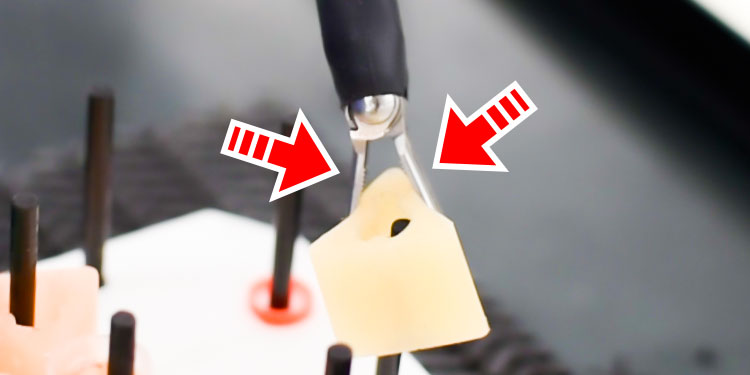
Saroa is the world's first minimally invasive surgical assist robot that successfully reproduces sense of force.
Using flexible and delicate air pressure control, Saroa allows the user to directly perceive the sense of force.
This enables the operator to perform procedures with almost the same level of sensation as if they were conducting the surgery with their own fingers, even in remote operation scenarios.
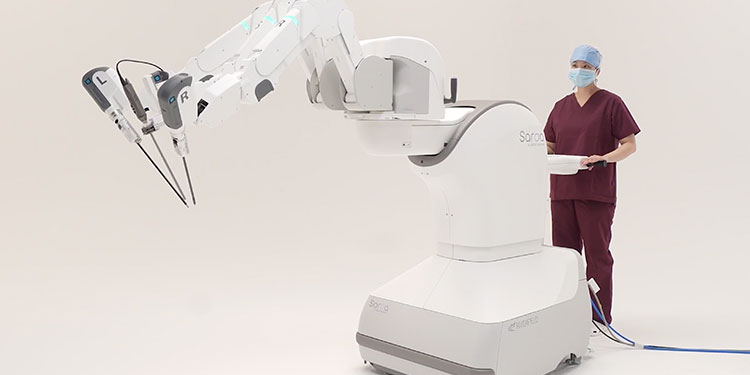
The ideal surgery is achieved when not only the operating surgeon but also the assistant doctors perform at their best.
We have realized the robot that can reproduce force sensation and perform intuitive operations in a compact size that makes it easy to collaborate with assistant doctors.



Conventional surgical robots relied solely on visual information obtained from camera images. Saroa is equipped with a system that estimates the gripping force based on control information and provides feedback to the remote operation interface.
Saroa enables safe and high-precision surgery by providing force feedback, without relying on the operator's experience or intuition.
In addition to the main monitor that displays images from the endoscope, Saroa’s surgeon console is equipped with a navigation monitor that displays various operational information.
Force information is also displayed as quantitative values (in Newton) and visual information in the form of bar graphs.
This operational information can also be provided to doctors and nurses other than the operating surgeon.

By adopting pneumatic drive, Saroa achieved a lightweight and compact design. This makes it easy to move between operating rooms and within the facility, allowing for more flexible operation.
The Saroa's arm operates with pneumatic control, which is Riverfield's core technology, to achieve delicate and soft movements. It can absorb the load on the patient caused by the machine's inherent stiffness, enabling safe surgical operations.
Pneumatic control technology has succeeded in slimming down the arm body. There is enough space for assistants to be in close proximity to the robot, considering the safety of medical personnel.

Saroa can be used in combination with endoscopes, monitors, and electrocautery equipment from various manufacturers. Since Saroa can use equipment already owned by the hospital, it also contributes to reducing the cost of installation.
| Japan Medical Device Nomenclature | Surgical Robotic Surgical Unit | Commercial Name / Medical Device Approval Number |
Saroa Surgical System / 30500BZX00108000 Saroa Instrument / 30500BZX00109000 Saroa Monopolar Instrument / 304ADBZX00118000 |
|---|---|
| Model | RF-SS01 |
| Category | Class 3 (specially-controlled medical devices) - specially-designated medical devices requiring maintenance |
| Sales Region | Domestic (Japan) |
| Target Medical Fields | Thoracic Surgery (excluding Cardiac Surgery), General Gastrointestinal Surgery, Urology, Gynecology |
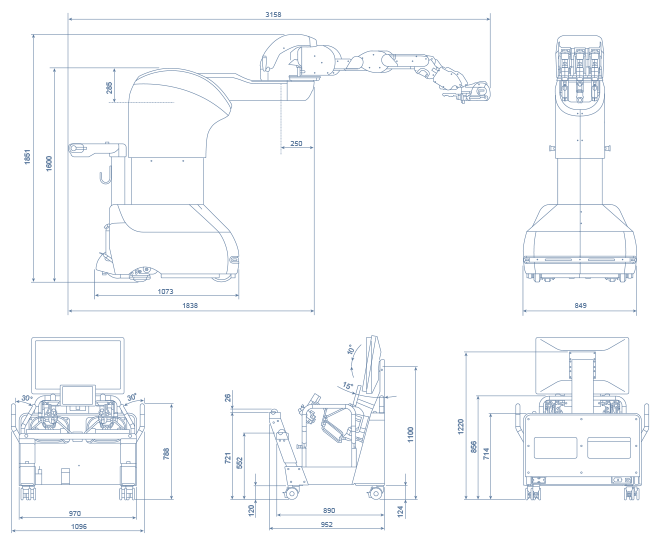
| Dimensions |
|
| Weight |
|


Surgical Robotic Surgical Unit "Saroa Saroa Surgical System" Catalog (PDF)
Medical Device Information Providing Website Attachment Information Menu (pmda.go.jp)
-----------------------------------------------------------------
Please refer to the following page for the package insert for Saroa.
Brand name: Saroa Surgical System, Manufacturing and sales approval number: 30500BZX00108000
Sales name: Saroa Instrument, Manufacturing and sales approval number: 30500BZX00109000
Sales name: Saroa Monopolar Instrument, Manufacturing and sales approval number: 304ADBZX00118000
------------------------------------------------------------------
https://www.info.pmda.go.jp/ysearch/html/menu_tenpu_base.html
Please select the inquiry type "About product security" from the product inquiry button below and contact us.
Riverfield Inc.
NMF Aoyama 1-chome Bldg. 4th floor, 8-1-22 Akasaka, Minato City, Tokyo 107-0052
TEL:03-6822-9700
FAX:03-6822-9701