Riverfield’s Pneumatic Control Technology
The basis of our technology is the accurate control technology for pneumatic systems that have been studied for many years in the Kagawa, Kawashima, and Tadano Laboratories of the Tokyo Institute of Technology.
A pneumatic actuator, a control servo valve, connecting piping that compose a pneumatic system, and the integrated design that takes into account the characteristics of these components enable innovative precise control and force sense estimation for pneumatic systems.
One of the characteristics of pneumatic pressure is its softness, or “compressibility”, as mentioned above.
When pressure is applied, the volume shrinks, and when pressure is reduced, it returns to its original volume. Applying this softness allows the creation of robots that are safe in contact with humans and have flexible movements.
On the other hand, the softness of compression technology makes it difficult to achieve precise movements, i.e., such as the “exact stop” movement. Therefore, pneumatic cylinders have generally been used for simple movements such as reciprocating between two predetermined points.
Riverfield’s Pneumatic Servo System consists of elements such as a pneumatic cylinder, a position sensor, a pressure sensor, a control servo valve, and connecting piping.
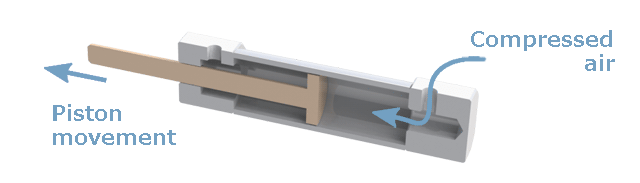
The pneumatic cylinder contains a syringe-like piston inside* Fig. 1. Pneumatic pressure moves the piston when compressed air is supplied into the cylinder.
We have achieved precise control of position and force by refining the technology of the integrated design of the Pneumatic Servo System such as low-friction pneumatic cylinders, optimal design of servo valves, and modeling of piping through industry-academia collaboration.
We apply feedback control using a position sensor and a pressure sensor to achieve precise movement with a pneumatic cylinder. The Position and pressure information is captured 1,000 times per second. The servo valve controls the flow rate of air supplied into the pneumatic cylinder based on the target position and pressure error.
Robot drive using pneumatic servo control has the following advantages and disadvantages.
The majority of conventional robots are electrically driven with gearboxes. The reason why pneumatic actuators are not used to drive robots is because they have many components and their control is complex due to their non-linearity.
In addition, electrically driven robots with high rigidity are suitable for high-speed, precision work that does not involve human contact.
However, in terms of robots that collaborate with humans, which are effective in an era of globally aging population and labor shortage, soft robots with softness are desirable from a safety perspective.
In the recent years, the R&D of soft robots has become active worldwide. Pneumatic pressure is very well suited for soft robot driving.
Surgical robots can take advantage of pneumatic drive because of the direct contact with the patient and the need to collaborate with an assistant physician. For this reason, Riverfield is actively developing pneumatically controlled surgical assist robots.
Riverfield is also looking to develop robots in other fields that take advantage of the benefits of pneumatic control, utilizing the knowledge and research accumulated in the medical field.
We believe that there is a tremendous potential in the ability to work collaboratively with humans at close range and to assist in various movements.
As mentioned above, pneumatically-driven robots are lightweight, soft, and capable of detecting force sensation through a direct drive, but are relatively poor at achieving high rigidity and precision drive at high speed.
On the other hand, electric drives generally require amplification of force through gears due to their low output. Therefore, a separate force sensor is required to detect force sensation, but it is suitable for high-rigidity and high-speed precision movements. Thus, the characteristics of the two are the exact opposite.

The robotic arm of Riverfield’s surgical robot successfully utilizes the both advantages.
The joints near the base of the arm are electrically driven for high rigidity and high speed movements, while the robotic forceps and other parts at the tip are lightweight and soft, and pneumatically driven to implement the force sensation detection function. The structure is a mix of pneumatic and electric, taking advantage of each drive while minimizing the disadvantages.
Compared to conventional electrically driven robot arms, the new robot arm is lighter and slimmer and has the ability to estimate force sensation at the tip.
The cost for major renovations of hospital facilities and operating rooms as well as new installation of special equipment will be reduced by reducing size and weight.
In addition, the pneumatic control has no gear box, which allows easy maintenance of the arm tip section.
Riverfield develops a technology for “force sense estimation” using pneumatic pressure.
This is a technology to estimate force sensation applied to a robot without installing a force-measuring sensor on the robot’s fingers*Fig.2。
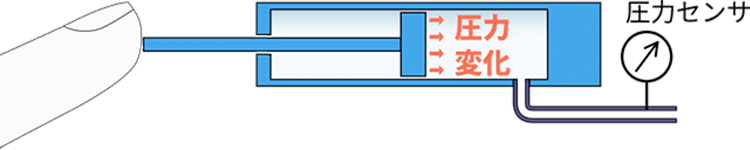
Pneumatic cylinders can drive the robot arm’s fingers directly without gears.
Therefore, when force sensation is applied to the robot’s finger, the force bounces back to the piston of the pneumatic cylinder placed at the base, causing the pressure inside the pneumatic cylinder to increase or decrease.
We measure the pneumatic cylinder displacement and the amount of pressure change at the time, and make a calculation taking into account the robot’s mechanism and posture to estimate the force sensation applied to the robot’s finger.
Riverfield’s Pneumatic Servo System can estimate the force senses essential for precise surgical procedures, such as “gripping force = grasping force,” “grabbing force = tactile force,” and “pulling force = traction force.”

The force estimated by the robotic forceps operating inside the patient’s body is sent as an electrical signal to the operator through an internet connection.
The operation interface can provide the operator (surgeon) with a direct and physical sense of force as a reaction force. The magnification of the force that is displayed as a reaction force can be changed in the software.
The estimated force is also displayed on a meter on the sub-monitor.
In addition, surgical data and operational logs such as endoscopic images, robot movements, and grasping or tactile forces to the organs are recorded, and these can be accumulated, analyzed, and machine-learned to support the upcoming “Surgery 4.0” and further technological development.
This is one of the major features and advantages of Riverfield products that are not available with conventional support robots without force feedback.
The benefits of direct force sense feedback include the following:
These displays provide important information in surgical procedures that require precise and delicate techniques.
In conventional products with no force feedback, experienced physicians use visual information from the endoscope to estimate force sense, but this requires skill.
With force feedback, it visualizes the tacit knowledge of physicians without relying on uncertainties such as experience or intuition.
Riverfield is currently researching remote control as well as robot development.
The surgical assist robot consists of a follower robot on the patient side. On the surgeon’s side, there is an operator interface that sends and receives signals via an Internet connection.
This makes the system compatible with remote operation, but for actual remote control, the robot must be able to stably operate even under communication delays.
Riverfield has remote control technology, a result of research from universities.
In addition, the availability of force information in remote control is expected to aid in accurate operation.
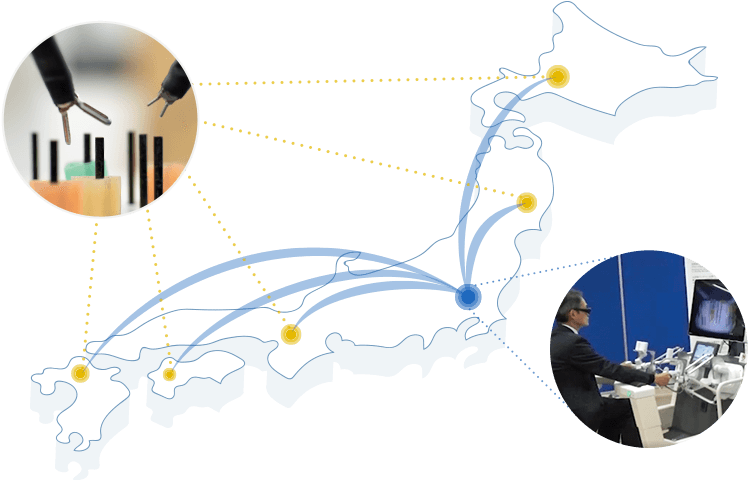
Using Riverfield’s surgical assist robot to connect the main unit including the operating interface and arm via a network and high-speed internet, we have been researching to perform a near-no-delay procedure.
This allows the procedure to be performed even when the surgeon and patient are not in the same hospital or facility.
There are still issues to be resolved with remote surgical assistance technology, such as the development of legislation. However, it is expected that in the near future, many medical institutions will introduce remote surgery. This will eliminate restrictions on distance and travel time, contributing to solving the problems of regional disparities and the uneven regional distribution of surgeons.