
小型で、術者との協調的な手術を進行できます。
よりスムースな腹腔鏡手術を可能とした次世代内視鏡ホルダロボットです。
より快適な腹腔鏡手術を提供するため、コンパクト設計、軽量化、ライトガイド運用を追求。
術者が思い通りの位置に移動でき、安定した手術を提供します。
コンパクト設計、軽量、ライトガイド運用を可能としたことにより快適な腹腔鏡手術を可能とした内視鏡ホルダロボット。
術者が思い通りの位置に内視鏡を移動させることができ、安定した手術術野を提供します。



従来機の3分の1程度のコンパクト設計を実現。
小型化により、術者とロボットの干渉が低減され、快適な空間で手術を進行することが可能。

腹腔内の観察をより広く提供するため、従来機の2倍の稼働域を拡張。
可動域向上により、幅広い術式に対応することができます。

空気圧制御の機構によりロボットは柔らかな動きで内視鏡を操作することが可能。
内視鏡を腹腔にセットする位置決め(不動点設定)は、不動点合わせを行わず操作が可能なため、術者は位置合わせを行わずに内視鏡を腔内に挿入するだけで操作することができます。

小型化により部品点数が削減し、製造にかかるコストや保守メンテナンス代にも寄与することができ、低コストで導入いただけます。
| 医療機器届出番号 | 13B1X10216000002 |
|---|---|
| 区分 | クラスⅠ |
| 一般的名称 | 内視鏡用ホルダ |
| 電源、電圧 | AC100-240V、50/60Hz |
| 消費電力 | 130VA |
| 重量 | 12.6kg |
|
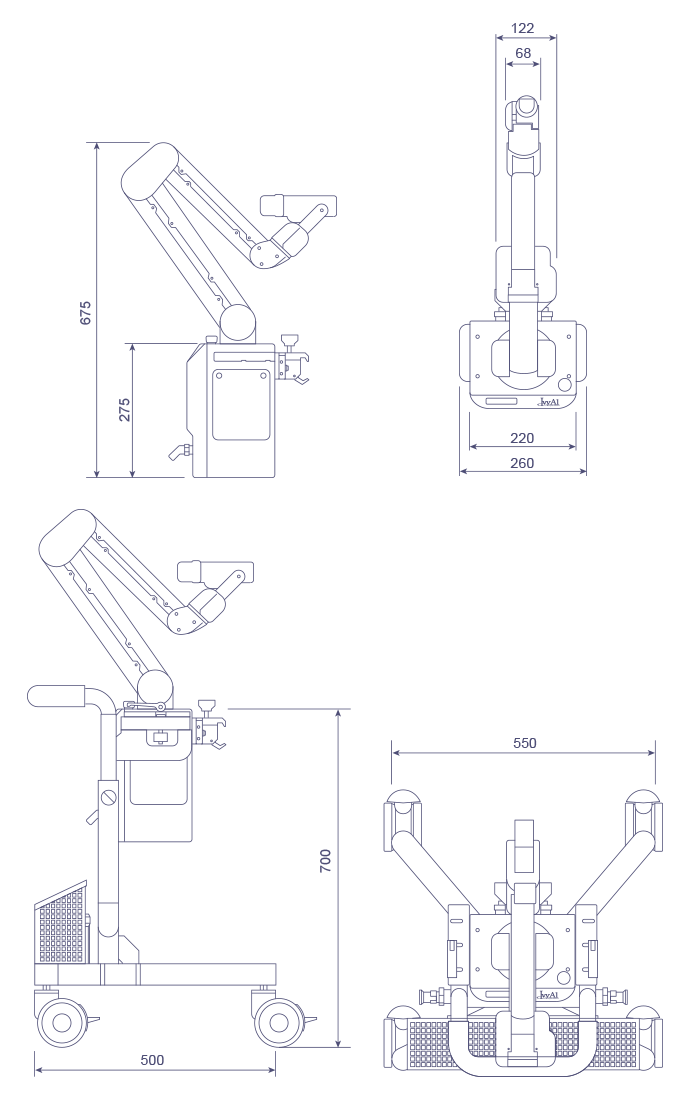
最大外形寸法【伸長時】(幅×高さ×奥行き) ※突起物等を除く |
260 × 1127 × 180mm |
IvyA1(販売名:内視鏡用ホルダIvyA1、製造販売届出番号:13B1X10216000002)の添付文書は以下のページよりご参照ください。
医療機器情報提供ホームページ添付文書情報メニュー(pmda.go.jp)
https://www.info.pmda.go.jp/ysearch/html/menu_tenpu_base.html
下記、製品に関するお問い合わせボタンより、お問い合わせ種別「製品のセキュリティについて」を選択の上、お問い合わせください。






