
Saroaサロアは、世界で初めて「力覚」を再現することに成功した、低侵襲外科手術支援ロボットです。
空気圧制御による柔軟かつ繊細な駆動により、力覚を直接感じることが出来るため、遠隔操作でありながら実際に自分の指で手術を行っているのとほぼ同等の感覚で施術を行うことが可能です。
執刀医だけではなく助手医師も最高のパフォーマンスを発揮するとき、理想の手術が完成します。
力覚を再現し直感的な操作をすることができるロボットを、助手医師と協調しやすい
コンパクトなサイズで実現しました。



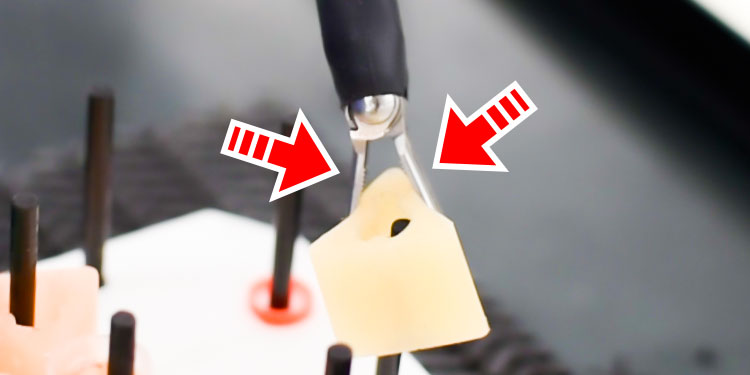
従来の手術支援ロボットは、カメラ映像から得られる視覚情報のみに依存していましたが、Saroaサロアは鉗子が握る力(把持力)を制御情報から推定し、遠隔操作インターフェースにフィードバックするシステムを搭載しています。
手術支援ロボットの操作経験やこれまでの勘などに頼ることなく、力覚を感じながら安全で高精度な手術を実現します。
Saroaサロアのサージョンコンソールには、内視鏡の映像を映すメインモニタの他に、様々な操作情報を表示するナビゲーションモニタが設置されています。
力覚の情報は定量数値(ニュートン値)およびバーグラフによる視覚情報としても表示されます。
執刀医以外の医師や看護師などにも操作情報を提供することができます。

空気圧駆動を採用することで、軽量・小型なデザインを実現しました。これにより、手術室間・施設内の移動もしやすく、より柔軟な運用が可能です。
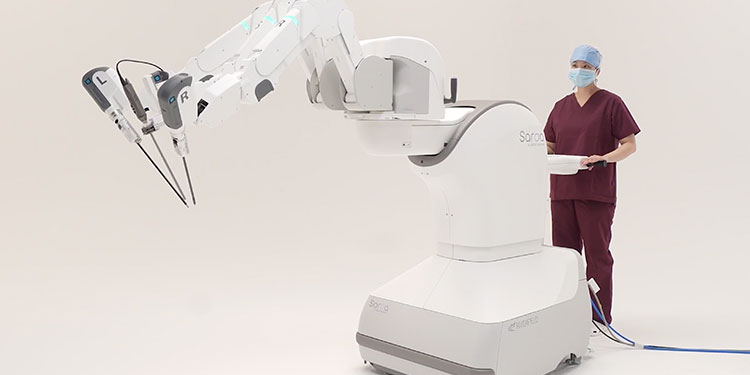
Saroaサロアのアームは、リバーフィールドのコア技術である空気圧制御で動作しているため、繊細で柔らかな動きを実現しています。機械特有の硬さによる患者様への負荷を吸収することができるため、安全な手術を行うことが可能です。
空気圧制御技術によって、アーム本体のスリム化に成功。助手医師などがロボットの至近距離にいても十分なスペースがあり、医療関係者への安全性も考えられたデザインです。

Saroaサロアは、様々なメーカーの内視鏡、モニタ及び電気メス装置を組み合わせて使用することができます。病院ですでに保有している装置を使用できるため、導入コストの低減化にも寄与します。
| 一般的名称 | 手術用ロボット手術ユニット |
|---|---|
| 販売名 / 承認(認証)番号 |
Saroa サージカルシステム / 30500BZX00108000 Saroaインスツルメント / 30500BZX00109000 Saroaモノポーラインスツルメント / 304ADBZX00118000 Saroaバイポーラインスツルメント / 306ADBZX00009000 |
| 型式 | RF-SS01 |
| 区分 |
クラス3(高度管理医療機器) 特定保守管理医療機器 |
| 販売地域 | 日本国内 |
| 対象診療科 | 胸部外科(心臓外科を除く)、一般消化器外科、泌尿器科、婦人科 |
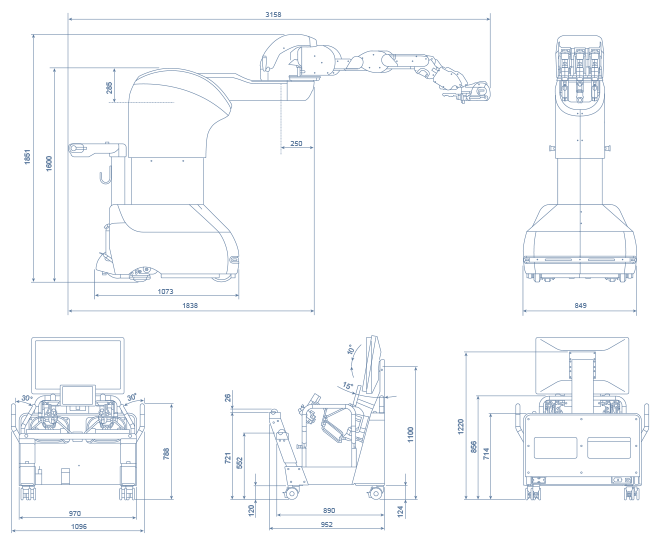
| 外形寸法 |
|
| 重量 |
|


手術用ロボット手術ユニット「Saroa サージカルシステム」カタログ
医療機器情報提供ホームページ添付文書情報メニュー(pmda.go.jp)
-----------------------------------------------------------------
Saroaの添付文書は以下のページよりご参照ください。
販売名:Saroaサージカルシステム、製造販売承認番号:30500BZX00108000
販売名:Saroaインスツルメント、製造販売承認番号:30500BZX00109000
販売名:Saroaモノポーラインスツルメント、製造販売認証番号:304ADBZX00118000
販売名:Saroaバイポーラインスツルメント、製造販売認証番号:306ADBZX00009000
------------------------------------------------------------------
https://www.info.pmda.go.jp/ysearch/html/menu_tenpu_base.html
下記、製品に関するお問い合わせボタンより、お問い合わせ種別「製品のセキュリティについて」を選択の上、お問い合わせください。






