
リバーフィールドには、東京工業大学の香川・川嶋・只野研究室で長年研究してきた空気圧システムの精密制御技術が基盤にあります。
空気圧システムの構成要素である、空気圧アクチュエータ、制御用サーボ弁と接続配管、これらの特性を考慮した統合化設計によって、従来の常識を覆す空気圧システムの精密制御や外力推定を実現しています。
空気圧の特徴の一つは、上述したように柔らかさを有すること、つまり「圧縮性」にあります。
圧力を加えると体積が縮み、圧力を下げると元の体積に戻ります。この柔らかさを応用することで、人と接触しても安全なロボット、しなやかな動作のロボットを実現することができます。
一方で、空気の柔らかさは精密な動作、すなわち「ぴったりと止める」動きを実現することが難しいという課題がありました。そのため、これまで空気圧シリンダは、あらかじめ定められた2点間を往復するといった単純な動作に用いることが一般的でした。
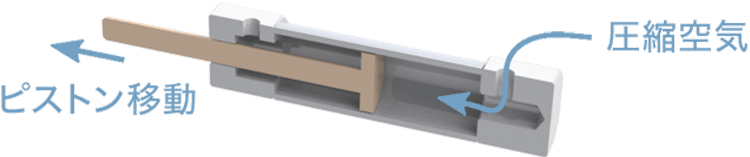
リバーフィールドの「空気圧サーボシステム」は、空気圧シリンダ、位置センサ、圧力センサ、制御用サーボ弁や接続配管などの要素で構成されます。
空気圧シリンダは内部に注射器のようなピストン※図1が入っており、圧縮空気を送り込むと空気の圧力によりピストンが動きます。
空気圧シリンダの低摩擦化、サーボ弁の最適設計や配管のモデル化など「空気圧サーボシステム」の統合化設計の技術を産学連携で磨き、精密な位置と力の制御を実現しました。
空気圧シリンダで精密な動きを実現するために、位置センサと圧力センサとを用いたフィードバック制御を行います。1秒間に1000回、位置と圧力情報をフィードバックします。目標となる位置や圧力の誤差に応じて、空気圧シリンダに送り込む空気の流量をサーボ弁で制御しています。
空気圧サーボ制御を用いたロボット駆動には、以下のようなメリットとデメリットが挙げられます。
従来のロボットは、ギアボックスを搭載した電動駆動がその大半を占めています。ロボットの駆動に空気圧アクチュエータが用いられない理由は、構成要素が多く、また非線形性を有しその制御が複雑になるからです。
また、人との接触がない高速かつ精密な作業には、電動駆動による高剛性なロボットが適しています。
しかし、世界的な高齢化や人手不足に有効な、人との協働作業ロボットでは、安全性の観点から柔らかさを有するソフトロボットが求められます。
昨今、世界的にソフトロボットの研究開発が盛んになっています。その駆動に空気圧はとても適しています。
手術ロボットでは、患者に直接触れる、また助手の医師との協働が必要なことから、空気圧駆動の利点が発揮できます。そのため、リバーフィールドでは、積極的に空気圧制御の手術支援ロボットの開発を進めています。
またリバーフィールドでは、医療領域で培った知見や研究を活かし、空気圧制御のメリットを活かした他分野のロボット開発も視野に入れています。
人との至近距離での協働作業や様々な動作補助が可能な点は、非常に大きな可能性を秘めていると考えています。
空気圧駆動のロボットは、上述したように、軽量、柔らかさがあり、直接駆動による外力検知が可能ですが、高剛性の実現と高速での精密駆動はやや苦手です。
一方で、電動駆動は一般に出力が小さいことから、ギアを介した力の増幅が必要です。そのため外力を検知するには別途力センサが必要なりますが、高剛性で高速な精密動作には適しています。このように両者の特徴は真逆と言えます。

リバーフィールドの手術ロボットは、両者の利点をうまく活用したロボットアームとなっています。
アームの根元に近い各関節は、高剛性で高速な動作を実現したいことから電動駆動を、先端のロボット鉗子などは軽量で柔らかく、また外力検知機能を実装するために空気圧駆動を採用し、それぞれのメリットを活かしつつデメリットを最小限に抑える、空気と電気のハイブリッド構造となっています。
従来の電動駆動ロボットアームと比較して、軽量スリム化を実現し、かつ先端での外力を推定する機能を実現しています。
小型・軽量化を実現できることで、病院施設や手術室の大きな改修や特殊な設備の新設負担を少なくすることが期待されます。
また、空気圧制御にはギアボックスがないのでアーム先端部分のメンテナンスが容易な設計となっています。
リバーフィールドでは、空気圧を利用した「外力推定」の技術を開発しています。
これは力を計測するセンサをロボットの手先に搭載することなく、ロボットに加わる外力を推定する技術です※図2。
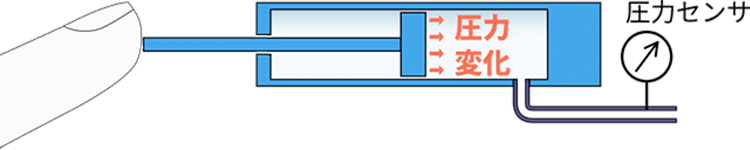
空気圧シリンダはギアを介さずに直接的にロボットアームの手先の駆動ができます。
ロボットの手先に外力が加わると、根元に配置した空気圧シリンダのピストンにも力が跳ね返り、空気圧シリンダ内部の圧力が増減します。
このときの空気圧シリンダ変位と圧力の変化量を測定し、ロボットの機構や姿勢を考慮した演算処理を行い、ロボットの手先に加わった外力を推定します。
リバーフィールドの「空気圧サーボシステム」は、【握る力=把持力】【掴む力=接触力】【引っ張る力=牽引力】といった精密な手術手技に必要不可欠な力覚を推定することができます。

患者の体内で動作するロボット鉗子で推定した力は、電気信号としてインターネット回線を通して操作側に送られます。
操作インターフェースにおいて、反力として操縦者(執刀医)に直接的・体感的に力覚を与えることができます。反力として提示する力の倍率はソフト上で変えることができます。
また、推定した力はサブモニターのメーターに表示されます。
さらに、内視鏡画像、ロボットの動作、臓器の把持力や接触力といった手術データや操作ログを記録し、それらを蓄積・分析・機械学習することで、来たるべき「Surgery 4.0」への対応や更なる技術開発に役立てることができます。
これは力覚フィードバックが搭載されていない従来の支援ロボットにはない、リバーフィールド製品の大きな特徴とメリットの一つと言えます。
力覚を直接フィードバックさせられるメリットとしては以下のようなことが挙げられます。
これらを提示することにより、緻密で繊細な手技を必要とする外科手術において重要な情報が得られます。
力覚フィードバックを得られない従来製品において、熟練の医師は内視鏡からの視覚情報で力覚を推定しているため、その感覚をつかむためには一定の訓練や経験が必要になります。
力覚フィードバックを得ることができれば、経験や勘といった不確定要素に依存することなく、医師の暗黙知の見える化が可能となります。
リバーフィールドでは、ロボット開発だけでなく遠隔操作も研究しています。
手術支援ロボットは患者側のフォロワーロボットと術者側の操作インターフェースから構成され、インターネット回線を通じて信号の送受信を行っています。
それにより遠隔操作に対応したシステムとなっていますが、実際に遠隔操作を行うためには、通信による遅延に対してもロボットが安定に動作することが求められます。
リバーフィールドは、大学からの研究成果として遠隔制御技術を有しています。
また、遠隔操作において力の情報が得られることは、的確な操作の助けになることが期待できます。
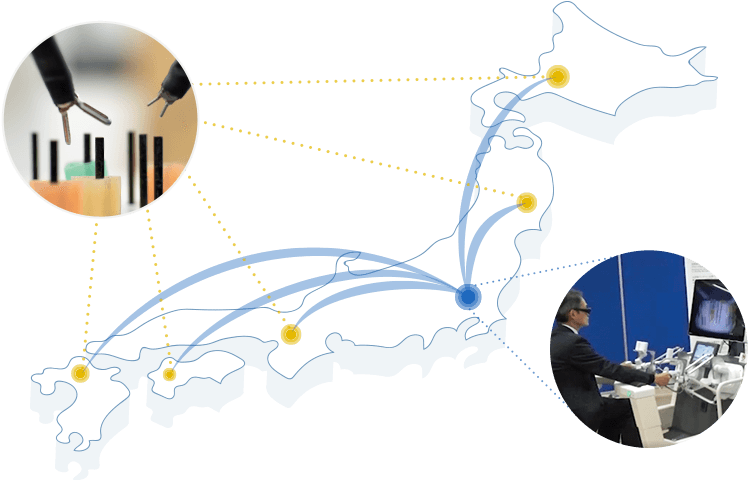
リバーフィールドの手術支援ロボットを利用して、操作インターフェースとアームを含む本体をネットワークで接続し、高速回線によって通信を行うことでほぼ遅延のない施術を行う研究を進めています。
これにより、執刀医と患者様が同じ施設にいない場合でも施術を行うことが可能になります。
遠隔手術はまだ法整備などの課題がありますが、そう遠くない将来、多くの医療機関で遠隔手術が導入されるでしょう。
距離や移動時間の制約をなくし、地域格差や外科医偏在の問題解決に貢献することが期待されています。







