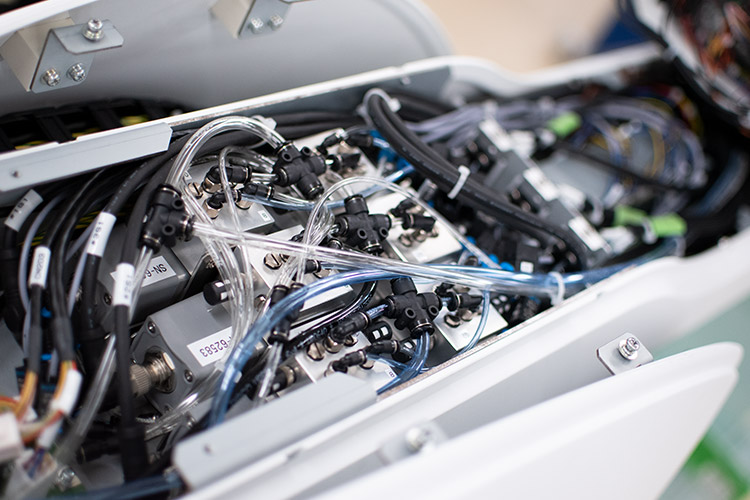
空気圧は、柔らかくしなやかな動きの再現に優れた技術です。
リバーフィールドは、怪我や事故のリスクを最低限に抑え、人間との共同作業における安全性の追求、
人間の動きを忠実に正確に再現する技術を中心としたロボット開発を行っております。
様々な独自の技術を有する国内の企業のご協力を得て、精密なものづくり大国である
日本ならではの匠の技を取り入れた精緻なロボット開発を進めています。
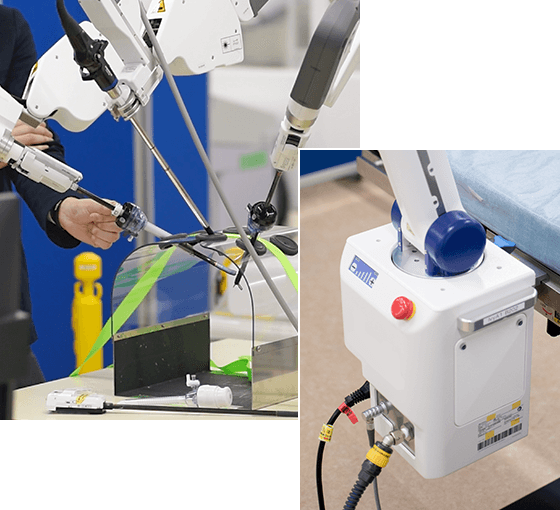
リバーフィールドは、2003年から東京工業大学を中心とした研究開発によって、ロボット鉗子の駆動に空気圧を用いる世界唯一の技術を確立しました。
東京医科歯科大学の外科の先生方のご協力を得て、試作と動物実験での評価を繰り返し実施し、手術ロボットの性能向上を図ってきました。
精密なロボットのハードウェアの設計と、それを精緻に制御するソフトウェア技術、両面から多様な研究開発を行いました。
また、医療機器として、安全に運用する、様々なリスクに対応できる周辺技術の研究にも注力してきました。このように約20年に渡る研究成果を土台として、手術ロボットの製品開発が行われています。